Le ZHC2931 est une version améliorée d'un contrôleur intégré multifonctionnel basé sur la technologie de l'Internet des objets. Les utilisateurs du système de contrôle de l'Internet des objets mis en œuvre par l'intermédiaire de ce contrôleur peuvent réaliser une surveillance à distance de l'équipement terminal. Fournit 1 port série (RS485/RS232), 2 DI, 1 DO et 1 interface AI, prenant en charge les opérations de traitement logique local, la collecte automatique et les rapports actifs, l'adaptation Modbus RTU/TCP, les rapports sur les seuils d'étalonnage automatiques et l'amarrage du logiciel de configuration, la détection IO des nœuds secs et humides et d'autres fonctions spéciales, prenant en charge les réseaux un-à-un et plusieurs-à-un. Champ d'application : Contrôle de l'Internet des objets, surveillance de l'automatisation industrielle, surveillance des données des laboratoires universitaires ; surveillance des données des sites industriels sur le terrain ; surveillance des données des points de surveillance agricole sur le terrain (serres, etc.) ; contrôle intelligent des bâtiments ; armoire de commande à distance des interrupteurs de l'éclairage public.
Caractéristiques du produit :
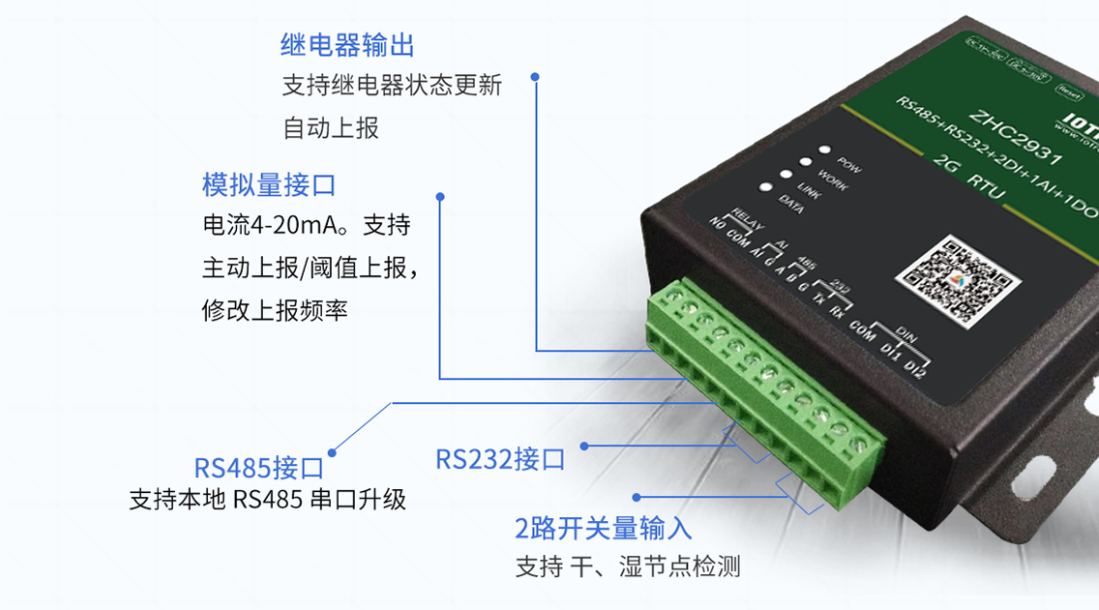
◆Support 1 sortie relais
◆ Prise en charge de 2 entrées DI (nœud sec/humide)
◆ Prise en charge d'une entrée analogique (courant)
◆ Prise en charge de 8 instructions de contrôle conditionnel, rendant le contrôle plus pratique
◆ Fournir 1 port série (RS485/RS232)
◆Support serial heartbeat package
◆ Prise en charge de plusieurs codes de fonction : 01, 02, 03, 04, 05, 06, 0F, 10
◆ Soutien à la définition de l'orientation de la communication active des données
◆ Prise en charge de TCP_Client, HTTP_Client
◆ Prend en charge deux modes de fonctionnement : le mode hôte et le mode esclave. Le mode hôte prend en charge la mise en cascade de plusieurs appareils Modbus
◆ Compatible avec Modbus RTU/TCP
◆ Prise en charge du transfert et de la mise en réseau dans le nuage
◆ Prise en charge de la mise à jour locale et de la mise à jour à distance
◆ Prise en charge du chien de garde matériel
◆ Plusieurs voyants lumineux indiquent l'état de fonctionnement de l'appareil
◆ Prise en charge de la résolution d'adresses de noms de domaine
◆ Prise en charge du réglage de l'APN
◆ Requête de signal de support
◆ Prise en charge de l'interrogation du numéro de la carte SIM
◆ Support heartbeat package
◆ Prise en charge des paquets d'enregistrement dans n'importe quel format pour garantir la légalité et l'unicité de l'identité de l'appareil
◆ Fournir une sortie de commutation
◆ Le relais adopte une isolation photoélectrique
◆ Le relais conserve l'état long-ouvert et long-fermé
◆Support timing flip of relay status
◆ Prise en charge du réglage de l'état de démarrage du relais
d'autres instructions :
Compte tenu des fonctions de surveillance des nœuds et de commutation d'état requises pour le contrôle de l'automatisation des armoires électriques sur site, un contrôleur à distance basé sur Modbus-RTU est conçu avec le microcontrôleur PIC comme noyau de contrôle. Le contrôleur à distance intègre le protocole de communication Modbus, gère l'adresse de l'appareil, configure les paramètres de communication, collecte les commutateurs et contrôle les fonctions, et peut se connecter à l'interface RS485 en aval du contrôleur principal, comme la passerelle de collecte de données, par le biais du bus RS485. Grâce à une vérification pratique, le contrôleur à distance peut réaliser de manière fiable le contrôle et la surveillance des commutateurs sur site du système de climatisation, avec un faible coût de mise en œuvre et un fonctionnement fiable.
1 Introduction Le protocole Modbus est un protocole de bus lancé par la société Modicon et très utilisé dans les domaines industriels [1]. Grâce à ce protocole, une communication fiable entre les contrôleurs et entre les contrôleurs et d'autres dispositifs peut être réalisée par le biais du réseau de communication. Modbus est un protocole de transmission de messages de la couche d'application sur la couche 7 du modèle OSI. Il permet une communication client/serveur entre les appareils sur différents types de bus.
Lors de la communication sur le bus, dans le mode RTU du protocole Modbus, chaque octet de 8 bits du message est divisé en deux caractères hexadécimaux de 4 bits. Le principal avantage de ce mode est que la densité de transmission à la même vitesse de transmission est supérieure à celle du mode ASCII[3]. Sur le bus RS458, le protocole Modbus peut réaliser des communications à distance de dizaines de mètres à des milliers de mètres avec les capacités de transmission équilibrée, de réception différentielle et de suppression des interférences en mode commun utilisées dans le RS-485 [4-5]. Le contrôleur à distance conçu utilise le microcontrôleur 8 bits de Microchip comme dispositif central et utilise RS458 avec fonction d'isolation comme bus de communication. Il est capable de collecter des quantités d'état de 12 bits et de contrôler des quantités de commutation de 4 bits. 2 Conception matérielle du contrôleur La conception globale du contrôleur à distance basé sur le microcontrôleur PIC16F73 est illustrée à la figure 1.
Le microcontrôleur PIC16F73 possède de riches ressources sur la puce, avec 22 interfaces GPIO, 3 minuteries, 11 interruptions et 1 port série universel AUSART et d'autres périphériques ; il possède une mémoire FLASH de 4K×14 bits et 192 octets de mémoire RAM ; température de fonctionnement Large, forte capacité anti-interférence, très adapté à l'utilisation sur site industriel. En particulier, il utilise un jeu d'instructions RISC à haute performance, possède une grande efficacité d'exécution, une programmation pratique et flexible, et fournit une solution très pratique pour les petits systèmes de contrôle [6-7 ]. Figure 1 Schéma fonctionnel général du matériel du contrôleur à distance Le contrôleur à distance utilise un PIC16F73-I/SP à 28 broches, et un total de 4 canaux de contrôle de sortie de quantité d'état, 12 canaux d'entrée d'acquisition de quantité d'état et 1 interface RS485 semi-duplex sont conçus. Afin de réaliser la fonction de protection du port du contrôleur, l'interface d'entrée d'acquisition de quantité d'état à 12 canaux est équipée d'un optocoupleur pour l'isolation ; la sortie de commutation à 4 canaux est réalisée par un relais ; en même temps, elle adopte une capacité d'isolation de tension de 2,5k V et une protection ESD de ±15KV. L'émetteur-récepteur RS-485 isolé ADM2587E met en œuvre une interface de communication RS485 à grande vitesse [8]. L'ensemble du circuit imprimé du contrôleur à distance est illustré à la figure 2. Figure 2 Circuit du circuit imprimé du contrôleur à distance (haut) Figure 3 Circuit de sortie de contrôle de l'état du module de contrôle à distance La figure 3 montre le circuit de l'interface de sortie du contrôleur, dans lequel le port IO du microcontrôleur PIC commande directement l'optocoupleur d'isolation TLP781 pour contrôler le passage de la bobine de travail du relais. Le port IO du microcontrôleur PIC commande directement l'optocoupleur d'isolation TLP781 pour contrôler le passage de la bobine de travail du relais. La figure 4 montre le principe de conception de l'un des ports DI d'acquisition de la quantité d'état du contrôleur.
Figure 4 Circuit d'acquisition de la quantité d'état avec protection d'isolation Le circuit d'acquisition utilise des optocoupleurs pour réaliser l'isolation entre la partie d'entrée et le MCU principal afin de protéger la sécurité des dispositifs de base ; en même temps, l'alimentation du port d'entrée HVCC=24V, passe d'abord par Q2/Z1/R17 Le circuit de stabilisation de tension linéaire est composé d'un circuit de stabilisation de tension linéaire pour réaliser une alimentation de stabilisation de tension indépendante pour chaque port DI ; en outre, la diode de suppression des transitoires TVS SMBJ26A peut réduire l'impact d'une haute tension inattendue. 3 Conception du logiciel du contrôleur Le logiciel du contrôleur à distance adopte le mode de système avant et arrière. Le programme d'avant-plan est une boucle d'interrogation infinie, dont la conception générale est illustrée à la figure 5.
Figure 5 Organigramme du logiciel frontal du contrôleur à distance Le programme frontal surveille principalement l'état des niveaux des 12 canaux de l'interface ID et le drapeau de réception d'octets de l'UART. Le logiciel d'arrière-plan du contrôleur comprend principalement le processus de surveillance des 12 niveaux d'E/S pour la collecte de la quantité d'état, le processus de contrôle de la sortie de la quantité d'état de 4 ports d'E/S de sortie, le processus de traitement du protocole Modbus-RTU, la réception du port série UART et la transmission du port série UART, soit un total de 5 tâches.
La figure 6 montre le processus d'envoi et de réception des trames de données UART. Compte tenu des performances rapides et efficaces du cycle d'instruction du microcontrôleur PIC de 200ns, afin d'augmenter la capacité anti-interférence du système, le port série UART utilise également le mode polling flag bit pour confirmer l'envoi et la réception des données.
Lorsque le port série UART reçoit la structure complète de la trame de données, le programme d'arrière-plan entre dans le flux de traitement du protocole Modbus-RTU pour analyser, exécuter et répondre à la trame de protocole. (a) Transmission de la trame de données UART (b) Réception par interrogation de la trame de données UART Figure 6 Processus d'envoi et de réception de la trame de données UART 4 Contrôleur Conception du protocole Modbus Le protocole Modbus est un protocole de demande/réponse qui peut fournir des codes de fonction correspondant à la trame de protocole stipulée.
Mots-clés : dtu