Что такое последовательная передача данных? Академическое объяснение - это метод непрерывной передачи одного бита данных по шине в определенный момент времени. Подобно лучнику, стреляющему из своего лука и стрелы часто: уш, уш, уш...
Что такое протокол последовательной передачи данных? Говоря прямо, это метод передачи протокола, используемый в последовательной связи.
Сколько существует типов протоколов последовательной передачи данных? Протоколы последовательной связи включают межсистемные протоколы и внутрисистемные протоколы.
Межсистемный протокол: Межсистемный протокол, используемый для связи между двумя различными устройствами. Подобно общению между компьютером и микроконтроллером. Связь осуществляется через внутреннюю шину. Среди распространенных протоколов - протокол UART, протокол USART и протокол USB.
Внутренний системный протокол: Внутрисистемный протокол используется для связи между двумя устройствами на печатной плате. При использовании этих внутрисистемных протоколов мы будем расширять периферийные устройства микроконтроллера без использования внутрисистемных протоколов. Использование внутрисистемных протоколов увеличивает сложность схемы и энергопотребление. При использовании внутрисистемных протоколов сложность схемы и энергопотребление снижаются, затраты уменьшаются, а доступ к данным становится очень безопасным. К числу распространенных протоколов относятся протокол I2C, протокол SPI и протокол CAN.
Протокол UART
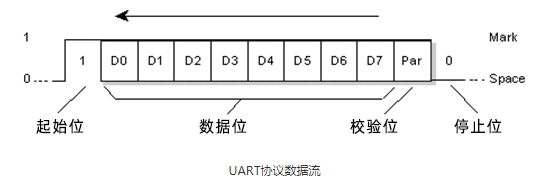
UART расшифровывается как Universal Asynchronous Transmitter and Receiver (универсальный асинхронный передатчик и приемник). Протокол UART - это последовательная связь с двумя проводными протоколами. Сигнальные линии кабеля данных обозначаются Rx и Tx. Последовательная связь обычно используется для передачи и приема сигналов. Передача и обмен данными с последовательным портом осуществляется без импульсов. UART получает байты данных и последовательно отправляет отдельные биты.
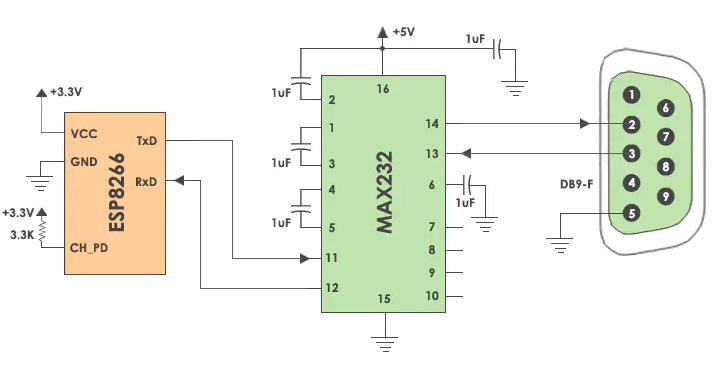
Протокол USAT обычно используется в качестве периферийного устройства MCU во встраиваемых системах; как правило, уровень TTL напрямую выводится с вывода микросхемы, а уровень RS232 может быть подключен к микросхеме преобразования в середине: Стандарты последовательной связи
UART - это полудуплексный протокол. Полудуплекс означает возможность передавать и принимать данные, но не одновременно. Большинство контроллеров имеют на плате аппаратный UART. Он использует линию данных для передачи и приема данных. Она имеет стартовый бит, 8-битные данные и стоповый бит, указывающий, что 8-битные данные передаются от старшего к младшему. Например: электронная почта, текстовые сообщения, рации, промышленное оборудование IoT для передачи данных, последовательный сервер.
Протокол USART
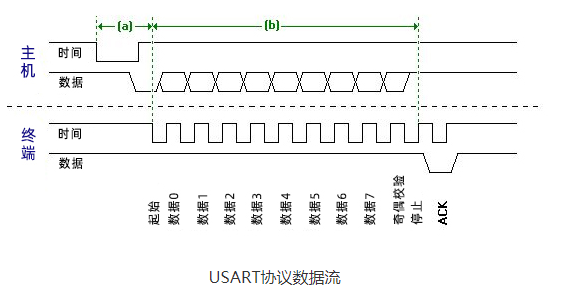
USART расшифровывается как Universal Synchronous and Asynchronous Transmitter and Receiver. Это последовательная связь по двухпроводному протоколу. Сигнальные линии кабеля данных обозначены как Rx и TX. Этот протокол используется для побайтной передачи и приема данных вместе с тактовыми импульсами. Это полнодуплексный протокол, то есть данные отправляются и принимаются одновременно на разных скоростях. По этому протоколу с микроконтроллером общаются различные устройства. Например, телекоммуникации.
USB-протокол
USB расшифровывается как Universal Serial Bus (универсальная последовательная шина). Это двухпроводной протокол для последовательной связи. Сигнальные провода кабеля данных имеют маркировку D и D-. Этот протокол используется для связи с периферийными устройствами системы. Протокол USB используется для последовательной передачи и приема данных на хост и периферийные устройства. Для связи по USB требуется программное обеспечение драйвера в зависимости от возможностей системы. USB-устройства могут передавать данные на хост без использования запрашиваемой шины. Сегодня большинство устройств используют эту технологию для связи с протоколом USB. Используйте USB для связи с контроллером ARM, как с компьютером. USB передает данные в разных режимах. Первый - медленный режим от 10 кбит/с до 100 кбит/с; второй - полноскоростной режим от 500 кбит/с до 10 мбит/с и высокоскоростной режим от 25 мбит/с до 400 мбит/с. Максимальная длина USB-кабеля составляет 4 метра.
Например: мышь, клавиатура, концентратор, коммутатор, накопитель.

Протокол I2C
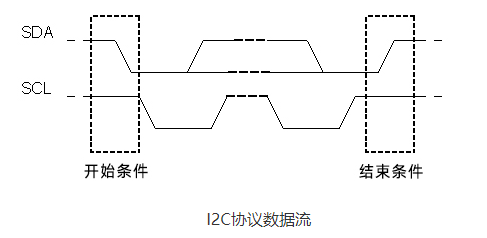
I2C расшифровывается как Inter Integrated Circuit. Для подключения всех периферийных устройств к микроконтроллеру I2C требуется всего два провода. Для передачи информации между устройствами I2C требуется всего два провода - SDA (последовательная линия данных) и SCL (последовательная линия синхронизации). Это ведущий протокол связи с ведомыми устройствами. Каждое ведомое устройство имеет уникальный адрес. Ведущее устройство передает адрес и флаги чтения/записи целевого ведомого устройства. Этот адрес совпадает с адресом любого включенного ведомого устройства, остальные ведомые устройства находятся в отключенном режиме. Как только адреса совпадают, между ведущим и ведомым устройством устанавливается связь, и данные отправляются и принимаются. Передатчик отправляет 8 бит данных, а приемник отвечает 1 битом подтверждения. После завершения обмена данными ведущая станция выдает условие "стоп".
Шина I2C была разработана компанией Philips Semiconductors. Изначально она была призвана обеспечить простой способ подключения центрального процессора к периферийным микросхемам. Периферийные устройства во встраиваемых системах часто подключаются к микроконтроллеру как устройства с памятью. Для подключения всех периферийных устройств к микроконтроллеру I2C требуется всего два провода. Эти активные линии, называемые SDA и SCL, являются двунаправленными. Линия SDA - это линия последовательных данных, а линия SCA - линия последовательного тактового генератора.
Подтягивающий резистор I2C:
Зачем использовать подтягивающие резисторы в линиях I2C SCL и SDA.
Линии SDA и SCL являются драйверами с открытым разрядом.
Он может подавать на выход низкий и высокий уровень сигнала.
Чтобы линия перешла на высокий уровень, необходимо установить подтягивающий резистор
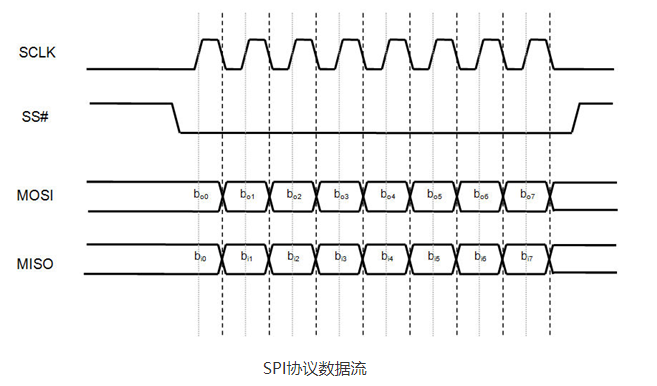
Протокол SPI
SPI расшифровывается как Serial Peripheral Interface (последовательный периферийный интерфейс). Это один из протоколов последовательной передачи данных, разработанный компанией Motorola. Иногда протокол SPI также называют 4-проводным протоколом. Для него требуется четыре провода MOSI, MISO, SS и SCLK. Протокол SPI используется для связи между ведущим и ведомым устройствами. Сначала хозяин настраивает тактовую частоту. Затем хозяин выбирает конкретное ведомое устройство для связи с помощью кнопки с выдвижной панелью. Выбор конкретного устройства запускает обмен данными между ведущим и ведомым устройствами. За один раз ведущий выбирает только одно ведомое устройство. Это полнодуплексный протокол связи. При передаче битов он не ограничивается 8-битными словами.
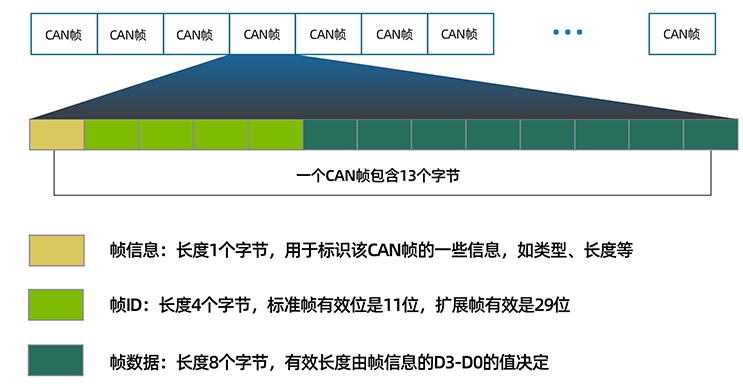
Протокол CAN
CAN расшифровывается как Controller Area Network. Это последовательный протокол связи. Он требует наличия двух линий CAN high (H) и CAN low (H-). Он был разработан корпорацией Robert Bosh в 1985 году для использования в автомобильных сетях. Он основан на транспортном протоколе, ориентированном на сообщения.
В 1970-х годах производители автомобилей начали внедрять новые функции, такие как антиблокировочная система тормозов, кондиционер, управление коробкой передач, дверные замки с центральным управлением и т. д. Эти функции требуют прокладки дополнительных проводов и сложной конструкции, что увеличивает затраты и риски. Чтобы преодолеть эти проблемы, в 1980-х годах компания Robert Bosch представила протокол CAN. В 1993 году этот протокол последовательной передачи данных был стандартизирован как ISO11898. Именно протокол CAN полностью изменил обмен данными между современными датчиками.
Протокол CAN широко используется в электронных сетях в автомобилях, самолетах и медицинских системах. К числу распространенных продуктов относится оборудование Can to Ethernet USR-CANET200
Ключевые слова: 4gdtu